概述
背景 Background
- 驱动工业机器人市场增长最重要的因素:机器人效率增高 & 人工成本上升
操作臂的力学与控制
位置与姿态的描述
- 为描述空间物体的位置和姿态,一般通过在物体上设置一个坐标系(或称位姿),然后根据某一参考坐标系中描述该位姿的位置和姿态
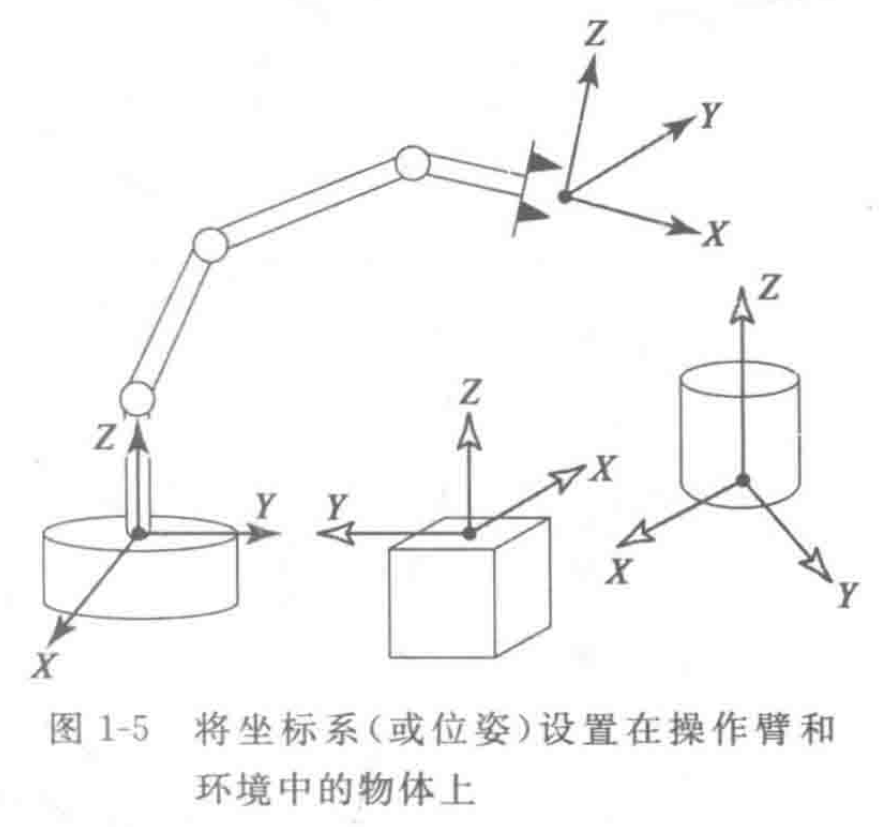
- 任一位姿都可以作为研究物体位置和姿态的参考坐标系
操作臂正运动学
运动学
- 研究物体的运动,而不考虑引起这种运动的力
- 具体而言:研究物体位置、速度、加速度和位置变量对于时间或者其他变量的高阶微分,(全部几何和时间特性)
操作臂的构成
- 几乎所有操作臂都是由刚性连杆组成的,相邻连杆间由关节连接起来,允许相对转动。
- 关节处通常装有位置传感器,允许测量相邻杆件的相对位置。
- 转动关节:测量关节角
- 滑动(移动)关节:测量关节偏移量
- 操作臂自由度:操作臂中具有独立位置变量的数目
如在四杆机构中只有一个自由度(尽管有三个可以运动的杆件)